few words about me
An engineer in Control Systems and Robotics, PhD student, working on Computer Vision, Deep Learning, Image Processing, Autonomous Vehicles. Python, C#, HTML, YOLO, CNNs.
An engineer in Control Systems and Robotics, PhD student, working on Computer Vision, Deep Learning, Image Processing, Autonomous Vehicles. Python, C#, HTML, YOLO, CNNs.
Traffic Signs Classification online with Convolutional Neural Networks and German Traffic Sign Recognition Benchmarks dataset. It is possible to upload image or to choose random image from test dataset.
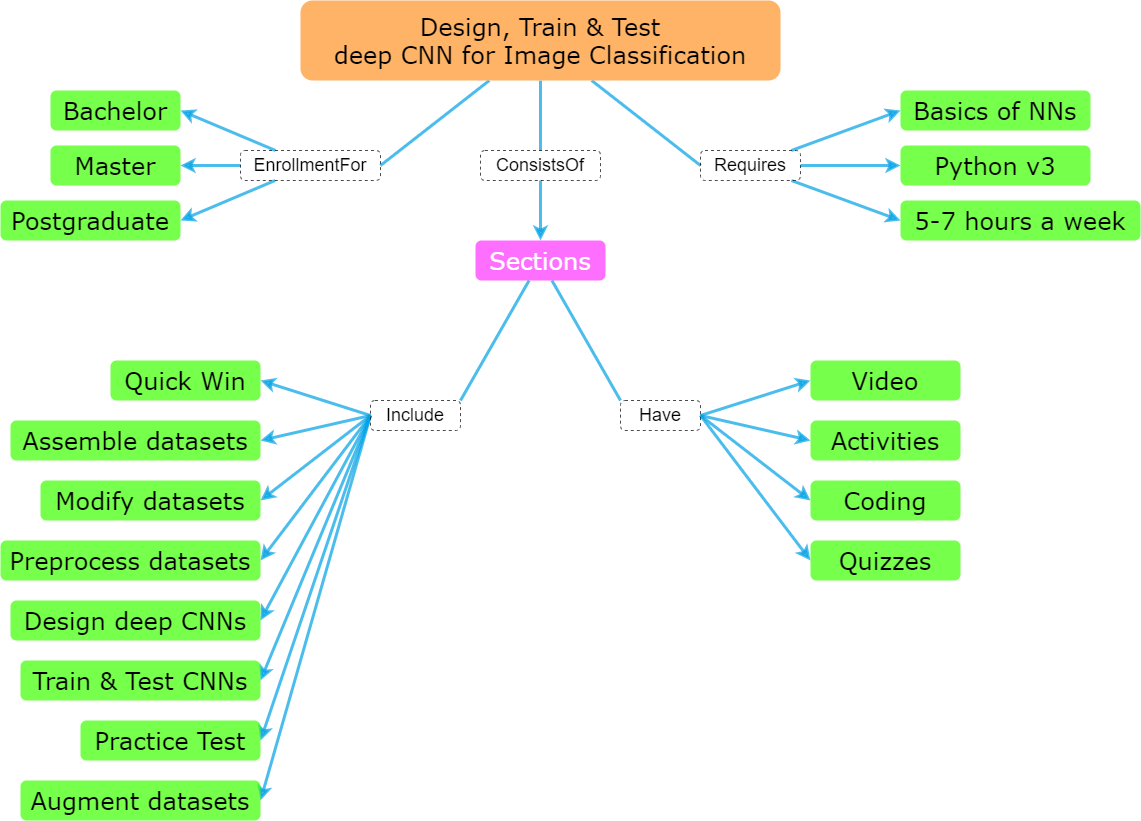
Related Course for Classification Tasks
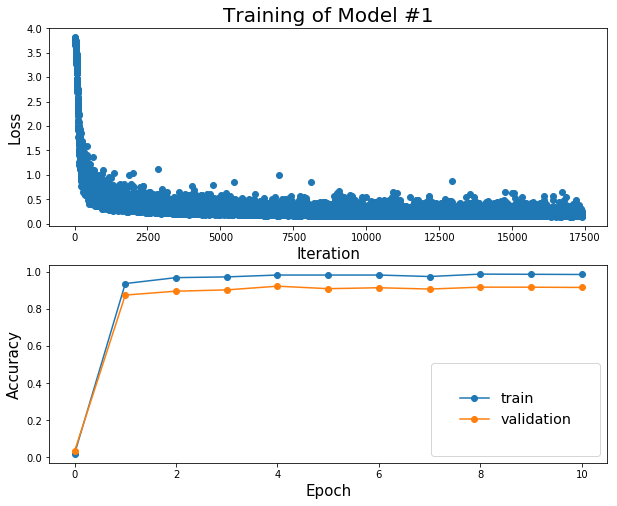
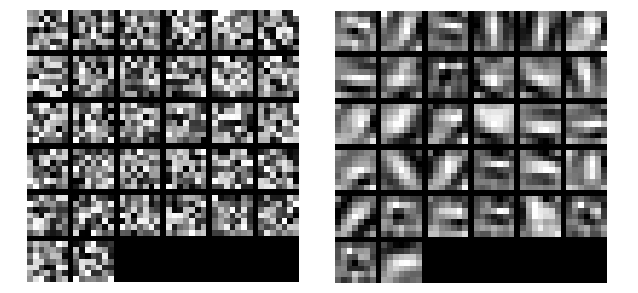
Classification Model
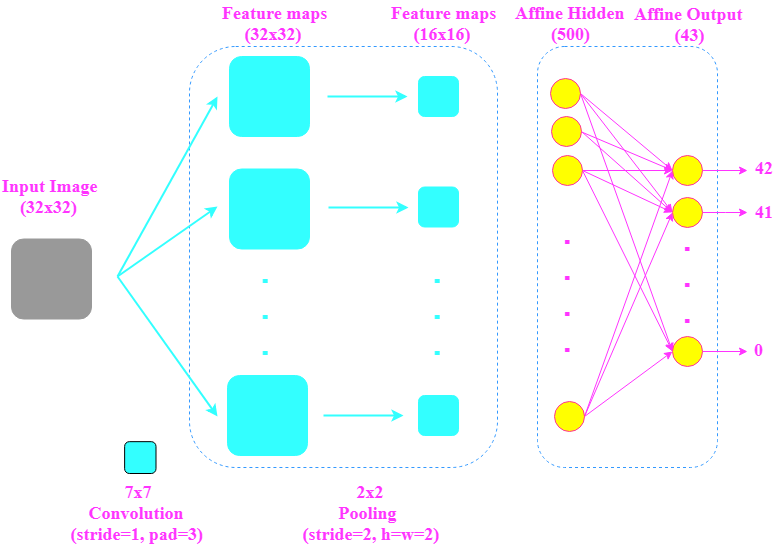
| Initial Parameters | Description |
|---|---|
| Weights Initialization | HE Normal |
| Weights Update Policy | Adam |
| Activation Function | ReLU |
| Regularization | L2 |
| Pooling | Max |
| Loss Function | Cross-entropy, Softmax |
| Hyperparameters | Description |
|---|---|
| Filters for ConvNet Layer | 32 |
| Size of the Filters | height=width=7 |
| Params for ConvNet Layer | stride=1, pad=3 |
| Params for Pooling Layer | stride=2, height=width=2 |
| Dimension of Hidden Affine Layer | 500 neurons |
| Regularization | 1e-3 |